

教員紹介
運動システム研究室 Kinematics System Laboratory
 准教授:酒井 英樹 [博士(工学)]
Associate professor: Hideki Sakai (Dr. Eng.)
専門分野:運動力学,計測工学,制御工学
所属学会:日本機械学会,自動車技術会
主な担当科目(学部):機械力学
主な担当科目(大学院):車両運動力学特論
教員室:D館340号室
Email: sakai_at_hiro.kindai.ac.jp
准教授:酒井 英樹 [博士(工学)]
Associate professor: Hideki Sakai (Dr. Eng.)
専門分野:運動力学,計測工学,制御工学
所属学会:日本機械学会,自動車技術会
主な担当科目(学部):機械力学
主な担当科目(大学院):車両運動力学特論
教員室:D館340号室
Email: sakai_at_hiro.kindai.ac.jp

研究室について Lab Introduction
環境問題対応技術として、ハイブリッド車や電気自動車の研究開発が盛んに行われています。これらの車両は、動力装置として電気モータを具備しているため、運動制御が可能です。しかし道路には凹凸があるため車が振動し、進路や速度などが変動するため、きめ細やかなモータ制御は困難です。そこで凹凸の影響を除去するために、本研究室では、運動力学の基本に即して、凹凸の影響を受けにくい車の運動方程式を研究しています。 そのため本研究室の教育方針として、運動力学と数値シミュレーション技術の習得に力を入れます。また就職後に、企業において技術力を発揮するために、研究計画の立案法や計画実行法・計画外のトラブル対処法、プレゼンテーション能力およびチームワーク構築についても力を入れます。なお本研究室では主にコンピュータシミュレーションを用いますが、テーマによってはドライビングシミュレータを用いた、仮想環境下での実験も行います。
研究紹介 Reseaches
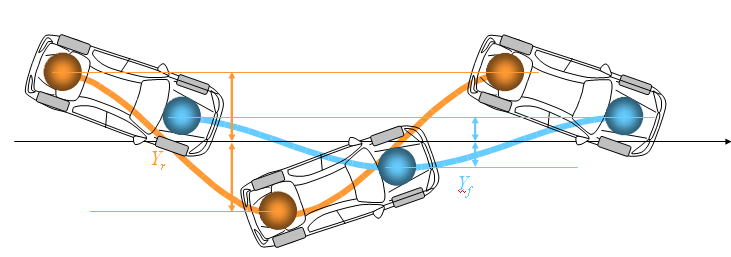
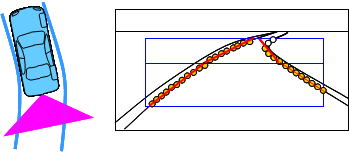
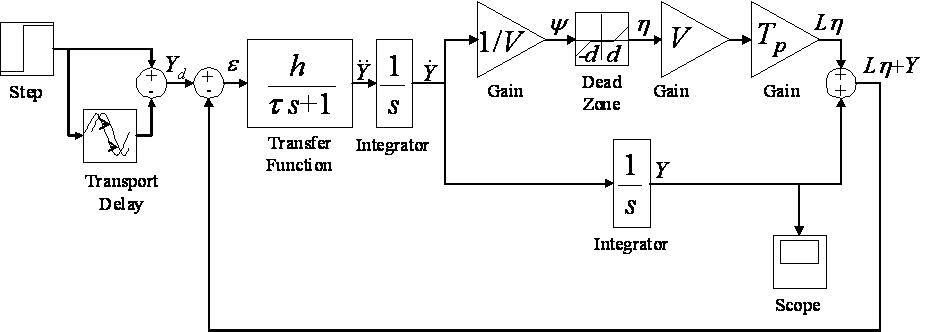
近年、自動車の動力に電気モータが用いられるようになり、自動車の旋回運動をモータで制御できるようになった。モータを用いて旋回運動をよりきめ細かく制御するためには、自動車の運動方程式が必要になる。しかし自動車は可動要素が多いために、厳密な多数の連立方程式を運動方程式に用いると、車載コンピュータでは処理しきれなくなる。そこで、少数の式でありながら高精度な運動方程式を開発している。
業績 Achievements
研究成果,受賞歴,社会活動等の業績は,下記の researchmap(研究者データベース:外部サイト)をご覧ください.

ウェブコンテンツ Web contents
研究成果や社会活動等に関する記事等は,下記の外部サイトをご覧ください.
