

教員紹介
ロボット制御研究室 Lab of Robot Control
 講師:友國 伸保 博士(工学)
Lecturer: Nobuyasu Tomokuni (Dr. Eng.)
専門分野:制御,メカトロニクス
所属学会:日本機械学会,日本ロボット学会
主な担当科目(学部):ロボット機構学,加工学
教員室:D館246号室
Email: tomokuni_at_hiro.kindai.ac.jp
講師:友國 伸保 博士(工学)
Lecturer: Nobuyasu Tomokuni (Dr. Eng.)
専門分野:制御,メカトロニクス
所属学会:日本機械学会,日本ロボット学会
主な担当科目(学部):ロボット機構学,加工学
教員室:D館246号室
Email: tomokuni_at_hiro.kindai.ac.jp
研究室について Lab Introduction
現在、医療・福祉分野をはじめとして、人間とのふれあいが必要な環境で働くことのできるロボットが待望されています。そのような環境ではこれまで以上の安定性と安全性が求められることになります。そこで、これらの課題の克服へ向け、本研究室では,ロボットが物にぶつかっても柔らかく動くことによって危険性を解消することのできる力制御と,常に安定状態を保つことのできるバランス制御の高度化に関して研究を行っています。具体的には,人間を傷つけにくい、力制御可能な小型ロボットを実現するハードウェア、3次元での制御をシミュレーションするためのソフトウェアおよび制御理論の研究などを実施しています。環境や、人間との接触があったとしても傷つけることなく、しなやかにバランスを取りながら対応できるロボットを目指しています。
研究紹介 Reseaches
- 倒立2輪脚車輪機構を用い,屋外を走行可能なパーソナルモビリティロボット
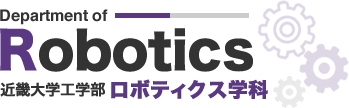
- 3次元シミュレータを用いた移動体の制御シミュレーション
- 多数の同一形状のアクチュエータを用いることで様々な物体を移動させるアクティブキャスタ
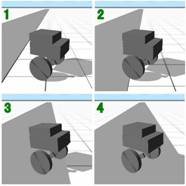
- コンプライアンス制御可能な小型ヒューマノイドロボット
- 小型モータコントローラ




業績 Achievements
研究成果,受賞歴,社会活動等の業績は,下記の researchmap(研究者データベース:外部サイト)をご覧ください.

