

教員紹介
知能ロボティクス研究室 Lab of Intelligent Robotics
 教授:黄 健 博士(医学・工学)
Professor: Jian Huang (Ph. D. Med. Sci. & Dr. Eng.)
専門分野:医療福祉ロボット,力感覚提示,ハプティックス,冗長ロボット
所属学会:IEEE,日本機械学会,日本ロボット学会,計測自動制御学会,日本生体医工学会
主な担当科目(学部):制御工学,ロボット工学
主な担当科目(大学院):ロボットシステム制御特論
教員室:D館245号室
Email: huang_at_hiro.kindai.ac.jp
教授:黄 健 博士(医学・工学)
Professor: Jian Huang (Ph. D. Med. Sci. & Dr. Eng.)
専門分野:医療福祉ロボット,力感覚提示,ハプティックス,冗長ロボット
所属学会:IEEE,日本機械学会,日本ロボット学会,計測自動制御学会,日本生体医工学会
主な担当科目(学部):制御工学,ロボット工学
主な担当科目(大学院):ロボットシステム制御特論
教員室:D館245号室
Email: huang_at_hiro.kindai.ac.jp

研究室について Lab Introduction
知能ロボティクス研究室では,医療福祉ロボットの開発,人間の体の優れた運動能力や知的能力を科学的な手法で測定・解析し,これらの機能をロボットで実現するというようなテーマの研究を中心に展開して行くことを考えています.また,多関節冗長ロボットの制御や人間らしい運動の実現,多脚ロボットの歩行と学習理論などのテーマを取り組みます.
研究紹介 Reseaches
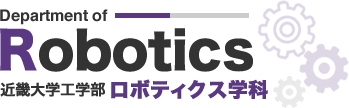
- 歩行意欲を促進する歩行車の開発
- 一軸フリー回転可能な胸部支持パッドを有する歩行車の開発
高齢者の立ち上がりと歩行を支援するため,現在さまざまな免荷式リフトが開発され,商品化されている.知能ロボティクス研究室では,1軸フリー回転機構つき胸部支持パッドを有する歩行車を試作し,複数のセンサを用いて歩行促進効果の定量評価を行った.
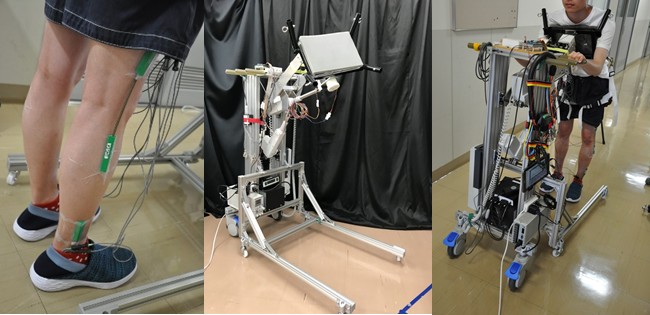
- 駆動型胸部支持パッドを有する歩行車の開発と歩行計測
従来の胸部支持パッドの回転は受動的な機構であり,病気で足が踏み出せない高齢者には利用できないため,利用者の歩行意欲を能動的に促進できる駆動型胸部支持パッドを有する歩行車を開発する.
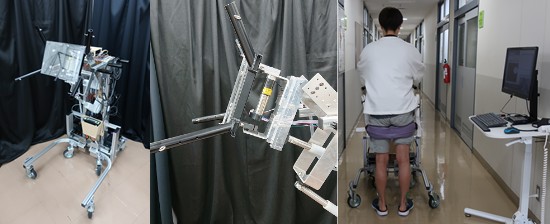
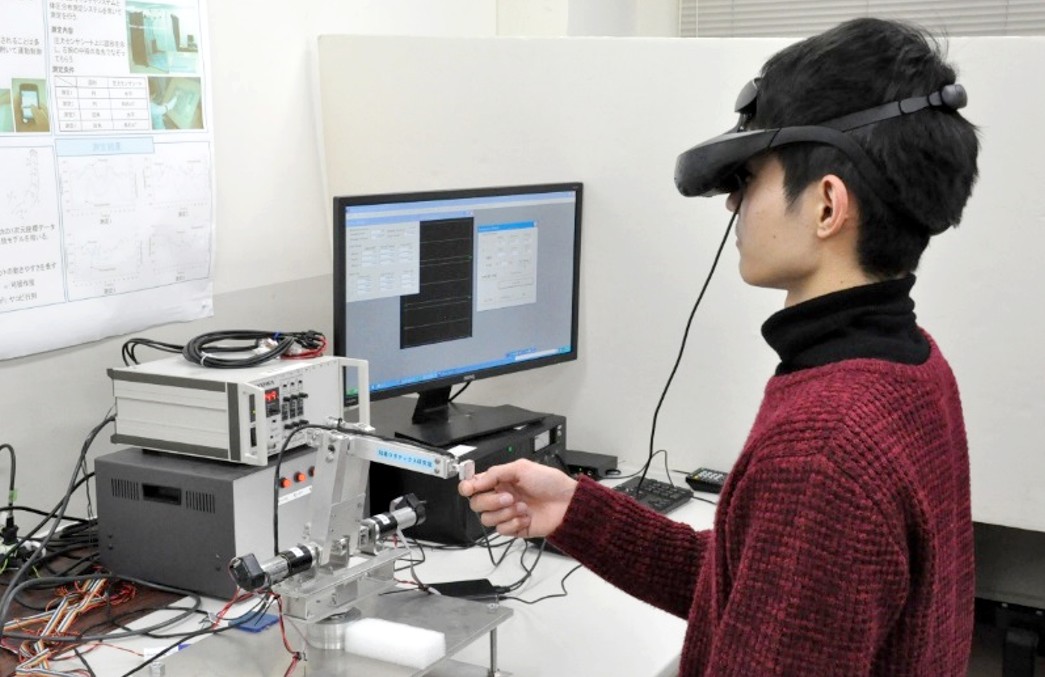
- 遠隔制御による力感覚の提示
これからのマルチメディアサービスでは,音声情報や映像情報とともに力感覚情報の提示が期待される.一方,人間の力覚と触覚を知覚するメカニズムが解明さていない課題が多い.知能ロボティクス研究室では,力感覚を仮想的に生成し操作者に提示するというハプティックインタフェースを開発し,遠隔制御による力感覚の提示と人間の力感覚認知のメカニズムの解明などの研究を行う.
業績 Achievements
研究成果,受賞歴,社会活動等の業績は,下記の researchmap(研究者データベース:外部サイト)をご覧ください.

ウェブコンテンツ Web contents
研究成果や社会活動等に関する記事等は,下記の外部サイトをご覧ください.
