

教員紹介
システムインテグレーション研究室 System Integration Lab
 准教授:柴田 瑞穂 博士(工学)
Associate professor: Mizuho Shibata (Dr. Eng.)
専門分野:柔軟物操作,柔軟ロボット,水中ロボット
所属学会:日本ロボット学会,日本機械学会など
主な担当科目(学部):力学,プログラミングI
主な担当科目(大学院):システムインテグレーション特論
教員室:D館243号室
Email: shibata_at_hiro.kindai.ac.jp
准教授:柴田 瑞穂 博士(工学)
Associate professor: Mizuho Shibata (Dr. Eng.)
専門分野:柔軟物操作,柔軟ロボット,水中ロボット
所属学会:日本ロボット学会,日本機械学会など
主な担当科目(学部):力学,プログラミングI
主な担当科目(大学院):システムインテグレーション特論
教員室:D館243号室
Email: shibata_at_hiro.kindai.ac.jp

研究室について Lab Introduction
システムインテグレーション研究室では,様々な機構,センサ,制御法を適切に組み合わせることで新しいロボットを生み出し,ロボットの適用範囲を拡げることを目指しています.現在は,物質の柔らかさを利用したロボット,水を利用したロボット,軽くて丈夫なロボットなどに興味があります.また,研究室では,研究活動およびゼミを通して,工学者・技術者として必要な,
- 動くものを作る技術
- 自分の考えたことを人にわかりやすく伝える技術
を身につけることを目指します.日々の研究活動を効率よく推進するために,研究ミーティング,トレーニングゼミ,ロボットコンテストなどを行います.学外での研究発表も行う予定です.ロボット,メカトロニクス機器を生み出すためには,知識,技術,好奇心を集めることが重要です.普段の生活で得た驚きや疑問が新しいものづくりを支えています.一緒に「わくわく」を形にし,「わくわく」を人に伝えていきましょう.
研究紹介 Reseaches
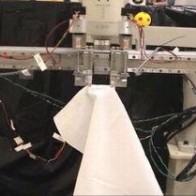
- 柔軟物を扱うロボット 布地を扱うロボット:ハンカチの形状や特性を利用して空中で展開動作を行う.
- 柔軟な構造を持つ移動ロボット テンセグリティ型移動ロボット:外殻をテンセグリティ構造で作成した水中ロボット.外殻を変形させることで運動特性が変化する.
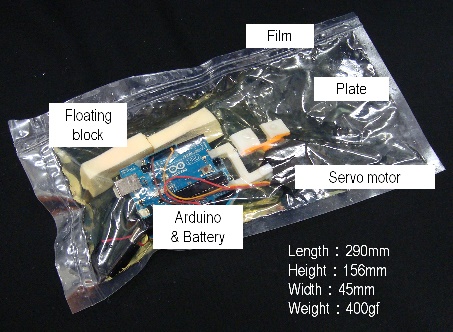
- 柔軟な構造を持つ移動ロボット 柔軟外殻水中ロボット:外殻を樹脂フィルムで構成した魚型水中ロボット.真空包装の技術を応用して製作する.

業績 Achievements
研究成果,受賞歴,社会活動等の業績は,下記の researchmap(研究者データベース:外部サイト)をご覧ください.

ウェブコンテンツ Web contents
研究成果や社会活動等に関する記事等は,下記の外部サイトをご覧ください.
- 工学部潜入レポート:やわらかいロボット
- World Robot Summit 2018:ものづくりカテゴリー(2~4日目:現地レポーター,5日目:解説)
