

研究活動
研究 Research Projects
本学科では、ロボットや自動車をはじめとするメカトロニクス関連分野において様々な研究開発を行っています。他の大学、研究機関、企業との共同研究も積極的に行っています。以下に各研究プロジェクトの概要を紹介します。
ロボットのバランス制御
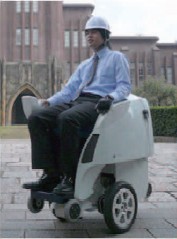

(パーソナルモビリティーロボット/倒立振子2輪ロボット)
ハプティックデバイスを用いた力感覚の提示


(力感覚提示装置/力感覚の遠隔通信)
車両制御の新しい手法の研究開発
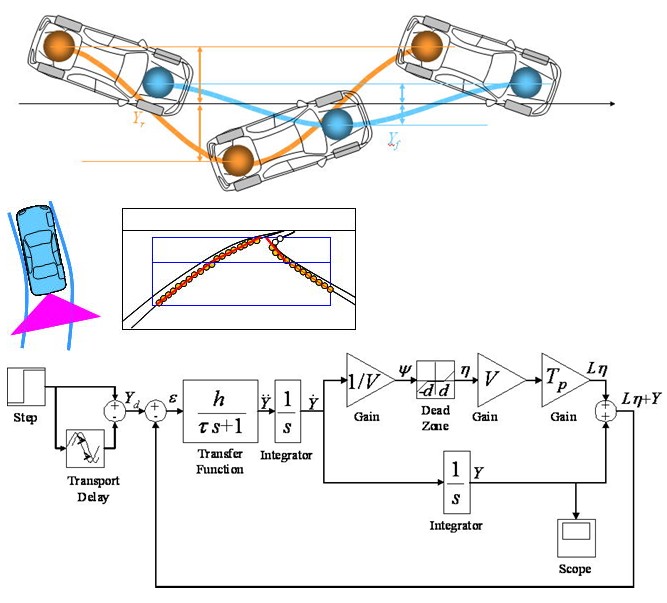
(道路の凹凸の影響を受けにくい車の運動方程式の研究)

次世代基盤技術研究所 Industrial Technology Research Institute
本学科の多くの教員は次世代基盤研究所の下記の各センターに所属し、研究活動を遂行しています。各センターの詳細は、次世代基盤研究所のサイトをご確認ください。
シンポジウム Symposium
第1回近畿大学ロボットメカトロニクス研究発表会(H26/9/3)
工学部主催の研究発表会が実施されました。大阪大学 金子真教授による特別講演が実施されました。






