

教員紹介
ヒューマン・ロボティクス研究室
 講師:松谷 祐希 [博士(工学)]
Lecturer: Yuki Matsutani (Dr. Eng.)
専門分野:制御工学,ロボット工学
主な担当科目(学部):機械要素設計,剛体の力学
教員室:D館242号室
Email: matsutani_at_hiro.kindai.ac.jp
講師:松谷 祐希 [博士(工学)]
Lecturer: Yuki Matsutani (Dr. Eng.)
専門分野:制御工学,ロボット工学
主な担当科目(学部):機械要素設計,剛体の力学
教員室:D館242号室
Email: matsutani_at_hiro.kindai.ac.jp

研究室について Lab Introduction
ヒューマン・ロボティクス研究室では,ロボット技術を用いて人間の運動特性と身体構造を工学的に理解すること,それらをロボットに応用することを目指し,ロボットの研究を行っています.
研究紹介 Reseaches
- 筋骨格システムのモデル化と制御に関する研究 人体特有の構造が人間の運動に寄与することを明らかにし,ロボットの制御性能を向上させるための研究を行っています.
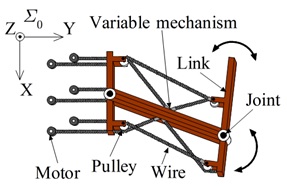
- 腱駆動ロボットに関する研究 人間のように関節の剛性を調節し,状況に応じた多様な運動を実現するため,リンク上に可変剛性機構を有する腱駆動ロボットを開発しています.

業績 Achievements
研究成果,受賞歴,社会活動等の業績は,下記の researchmap(研究者データベース:外部サイト)をご覧ください.

