

教員紹介
ハードウェア制御研究室 Hardware Control Lab
 教授:岡 正人 [博士(工学)]
Professor: Masato Oka (Dr. Eng.)
専門分野:福祉ロボット,デジタル回路
所属学会:日本機械学会,電気学会,日本AEM学会
主な担当科目(学部):デジタル電子回路,コンピュータ科学基礎
主な担当科目(大学院):ハードウェア制御特論
教員室:D館241号室
Email: oka_at_hiro.kindai.ac.jp
教授:岡 正人 [博士(工学)]
Professor: Masato Oka (Dr. Eng.)
専門分野:福祉ロボット,デジタル回路
所属学会:日本機械学会,電気学会,日本AEM学会
主な担当科目(学部):デジタル電子回路,コンピュータ科学基礎
主な担当科目(大学院):ハードウェア制御特論
教員室:D館241号室
Email: oka_at_hiro.kindai.ac.jp
研究室について Lab Introduction
近年我が国では、急速に高齢化が進み医療や福祉分野においてさまざまな対応が求められています。本研究室ではこれらのニーズに対応するために医療・福祉分野で活躍できるロボットを研究しています。研究室ではロボットを製作して動かすために、
- マイクロコンピュータの使い方
- 部品の加工
について技術を身につけます。1についてはPICマイコンという小型のマイクロコンピュータを用います。家電製品や自動車に用いられています。このマイコンのI/Oポート(入出力端子)の使い方やC言語による制御プログラムを作成します。これによりロボットアームなどを自由に制御できるようになります。また2については旋盤やフライス盤の加工装置の使い方を学びます。ロボットを構成する部品はさまざまな形をしています。この部品を旋盤やフライス盤を用いることにより、目的の部品を製作することができます。卒業研究ではこれらの技術を身につけることによりロボットを製作していきます。
研究紹介 Reseaches
- MRI対応型手術支援アームに関する研究 本研究はMRI(磁気共鳴画像処理装置)室において、活躍できる手術支援アームに関する研究です。現在、手術ロボットとしてはダビンチやゼウスが活躍しています。しかしながら、これらのロボットは電磁モータを用いており、MRIと組み合わせて使うことができません。また、磁性体(鉄など)は一切用いることができません。開口部の狭いクローズド型MRIでも動作可能な中空型超音波モータ駆動方式を用いた手術支援アームを製作しています。
- 食事支援ロボットに関する研究 本研究は、頚髄(けいずい)損傷などの障害によって手を動かすことのできない人を対象とした食事支援ロボットに関する研究です。現在市販されている食事支援ロボットは、アーム型ロボットを基本としており、食事を運んでいる途中にこぼしてしまう欠点があります。この研究では構造を根本的に見直した(途中で食事をこぼさない)ロボットを製作しています。また、アクチュエータに超音波モータを用いることにより動作音を発生することなく、静かな環境で食事をすることができます。

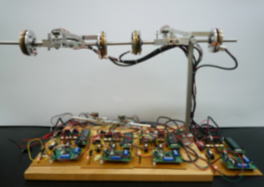 図1 MRI装置 図2 手術支援アーム
図1 MRI装置 図2 手術支援アーム

 図3 超音波モータ 図4 食事支援ロボット
図3 超音波モータ 図4 食事支援ロボット
業績 Achievements
研究成果,受賞歴,社会活動等の業績は,下記の researchmap(研究者データベース:外部サイト)をご覧ください.

ウェブコンテンツ Web contents
研究成果や社会活動等に関する記事等は,下記の外部サイトをご覧ください.
